Het trottle quadrant (TQ) of control stand is een control-unit waarmee het motorvermogen gereld wordt en de straalomkeerders worden bediend. Daarnaast worden de secundaire flightcontrols via de control stand bediend zoals de flaps, speedbrakes en de horizontale stabilisator. Ook wordt via de TQ de parking brake geactiveerd. Behalve bovenstaande levers zijn er op de TQ ook diverse switches aanwezig die o.a. te maken hebben met de koppeling van de automatische piloot en auto-throttle functies. De throttle quadrant kan handmatig door de piloot of via de autopilot bediend worden.
Revolution Simproducts
In mijn 737 cockpit maak ik gebruik van een Revolution Simproducts 737 throttle quadrant (TQ). Dit betreft oorspronkelijk een niet-gemotoriseerde variant. Dat wil zeggen dat de hendels (levers) alleen met de hand bediend worden. In een echt model bewegen de levers ook automatisch tijdens een vlucht met de autopilot ingeschakeld.
Het merk Revolution Simproducts bestaat inmiddels niet meer en het is dan ook al een wat ouder model. Ik heb deze destijds tweedehands overgenomen. De vorige eigenaar heeft de unit nog wel voorzien van 2 elektromotoren om de throttle levers aan te drijven. Voordat ik de unit in de cockpit installeer ga ik deze eerst onderhouden en upgraden. Onderdelen worden schoon gemaakt en waar nodig opnieuw ingevet zodat het weer gangbaar wordt. Daarnaast pas ik de bestaande motoraandrijving aan van de throttle levers en ook de overige onderdelen worden gemotoriseerd.
Ik ga de volgende functies upgraden / motoriseren:
- Throttle levers – Bestaande riemaandrijving aanpassen door een directe motor/ tandwiel aandrijving met slipkoppeling;
- Speedbrake lever – motoriseren met slipkoppeling zodat handmatige bediening ook mogelijk is;
- Speedbrake lever – Solenoid lock mechanisme t.b.v. flight detent stop;
- Trimwheels – motoriseren met belt / tandwiel aandrijfmechanisme;
- Trimwheels indicator – motoriseren met belt / tandwiel aandrijfmechanisme;
- Parking brake lever – aansturen met solenoid mechanisme.
Throttle levers
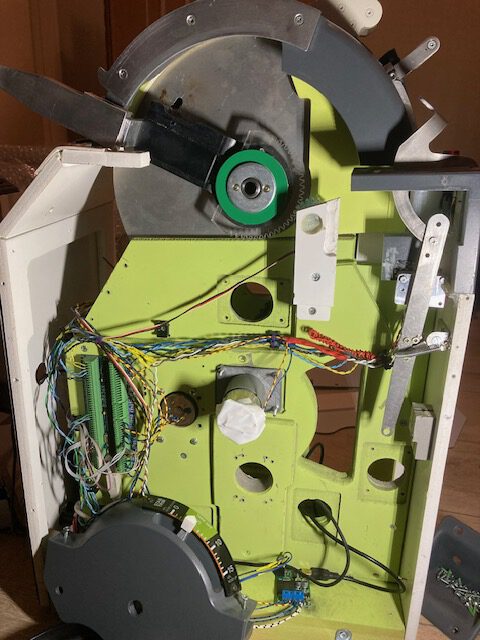
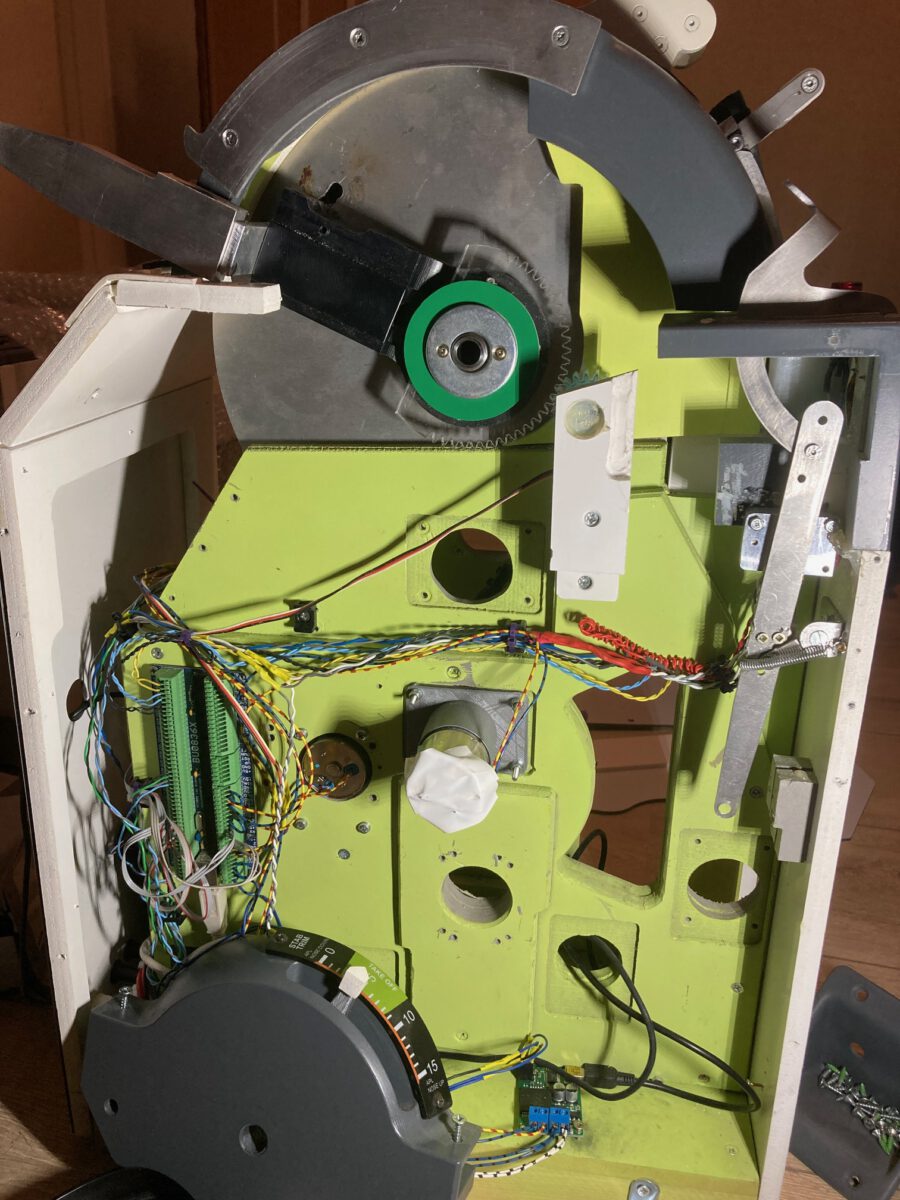
Ik ben begonnen met het verwijderen van alle zijpanelen en heb de unit bijna volledig uit elkaar gehaald. De unit was best vervuild van binnen door losgelaten foam, stof e.d.
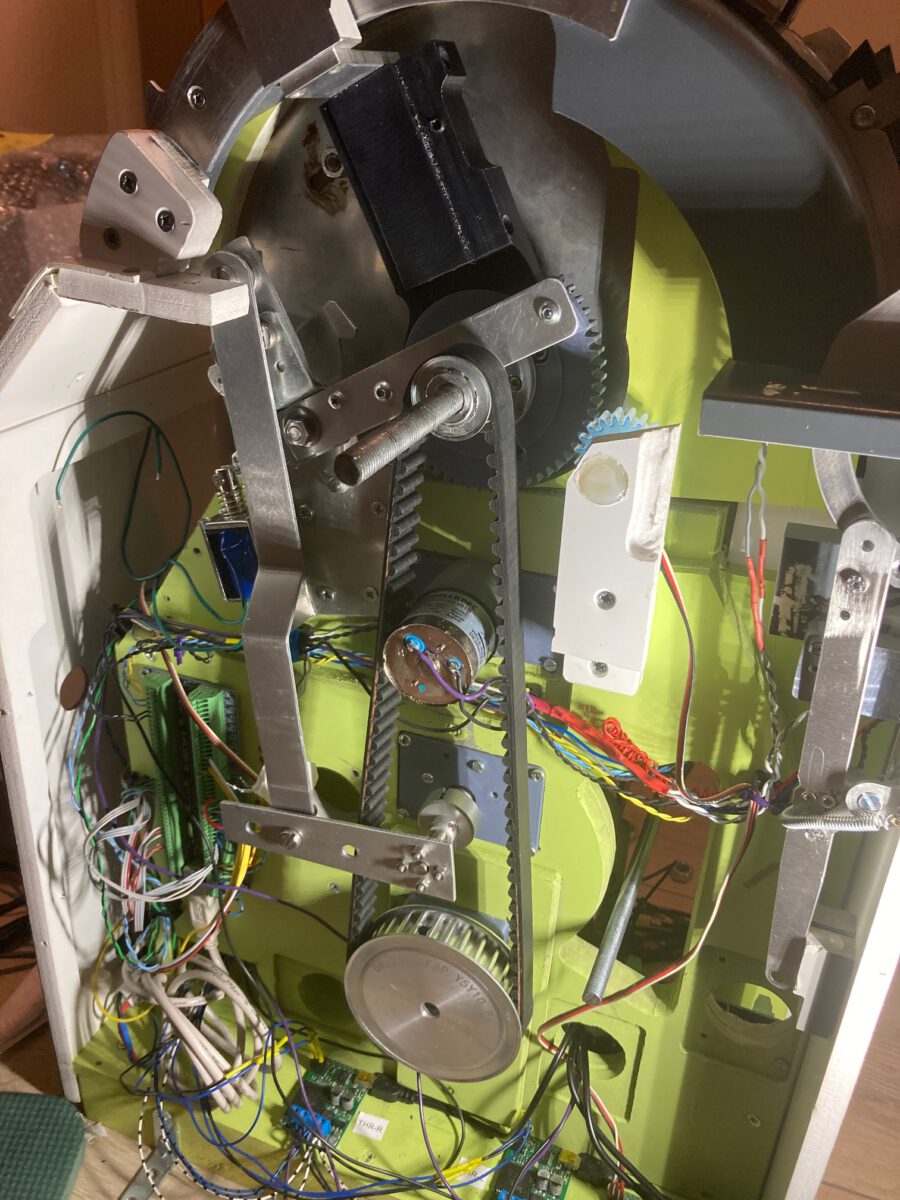
Aan de linkerzijde zien we het trimwheel , 2 bestaande motoren voor de throttle levers, het parkingbrake mechanisme, een Leo Bodnar kaart voor de schakelaars en potmeters en twee Pololu JRK 21V3 motor interfacekaartjes. Ook valt mij op dat in dit niet-gemotoriseerde model toch uitsparingen aanwezig zijn om motoren in te bouwen. De twee motoren die gebruikt zijn voor de throttle levers zijn 12V DC motoren van Modelcraft met een gearbox 1:100.

Aandrijving throttle
De bestaande aandrijving van de throttle-levers werken met een v-riem die het (door de fabrikant afgeslepen?) tandwiel aandrijft die met de lever verbonden is. Deze aandrijving heb ik vervangen door een directe tandwielaandrijving met een slipkoppeling. Ik maak per lever gebruik van de volgende onderdelen:
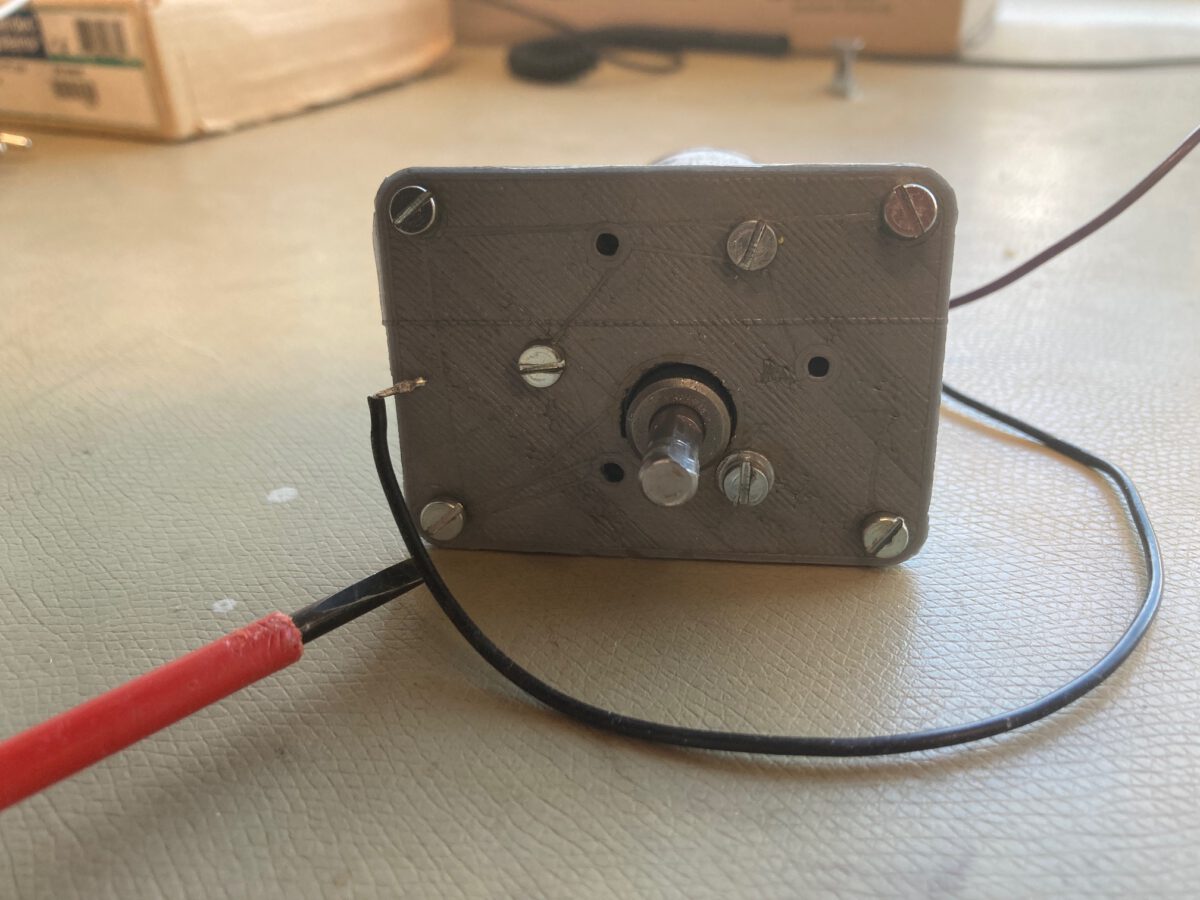
- Modelcraft 12V DC motor met een gearbox verhouding 1:100
- Mentor slipkoppeling (besteld bij Conrad)
- Een 3D geprint tandwiel maat T104 en T20 van PLA-ST (extra sterk)
- Pololu JRK 12V12 motorcontroller
Met behulp van Autocad Fusion 360 heb ik een T104 tandwiel getekend die qua maat overeenkomt met het originele tandwiel, maar dan met de tanden er nog aan… Deze wordt aangedreven door een kleiner T20 tandwiel die exact om de slipkoppeling heen past. Het tandwiel heb ik met twee M3 boutjes vastgezet aan de slipkoppeling die dan weer verbonden is met een 12V DC motor. De kracht (max 30 Ncm) van de slipkoppeling kan ingesteld worden door met een kleine punttang de onderkant van de slipkoppeling aan te draaien.



Tijdens de eerste test draaide de motor wel maar het tandwiel niet. Het is daarom van belang om de slipkoppeling met de juiste kracht in te stellen zodat deze niet doorslipt wanneer de motor het tandwiel aandrijft. Na de juiste instelling werkt het perfect!
De 12V dc motoren worden aangestuurd door een Pololu JRK 12V12 motorcontrollers met feedback. Dat wil zeggen dat de potmeters voor de positiebepaling direct verbonden zijn met deze interfacekaarten. Deze JRK’s worden direct door ProSim ondersteund en kunnen naar wens ingesteld worden via een Pololu configuratietool.
Speedbrake lever
Het motoriseren van de speedbrake lever is veruit het lastigste onderdeel om aan te passen. Met name doordat de motor op een andere plek zit dan het tandwiel van de lever en doordat de ruimte beperkt is. De 12V DC motor (gear 1:50) van de speedbrake lever zit onder de motor van de linker throttle. En onder deze motor zit weer de motor + tandwiel van de trimwheels. Om de lever aan te kunnen drijven gebruik ik een armsysteem gemaakt van 2 mm aluminium. Dit is sterk genoeg en gemakkelijk te bewerken. Het bepalen van de juiste armlengtes, draaipunten en verschillende hoeken maakt dat er de nodige prototypes gemaakt zijn om het juiste ontwerp te vinden.
Met de speedbrake lever worden (zoals de naam al doet vermoeden…) de speedbrakes bediend. De speedbrake lever kent verschillende posities:
- DOWN – alle spoilers zijn gestroomlijnd met de vleugel;
- ARMED – auto speedbrake systeem is geactiveerd;
- FLIGHT DETENT – alle spoilers zijn uitgeschoven tot hun maximale positie voor gebruik tijdens de vlucht;
- UP – alle spoilers zijn uitgeschoven tot hun maximale positie voor gebruik op de grond.
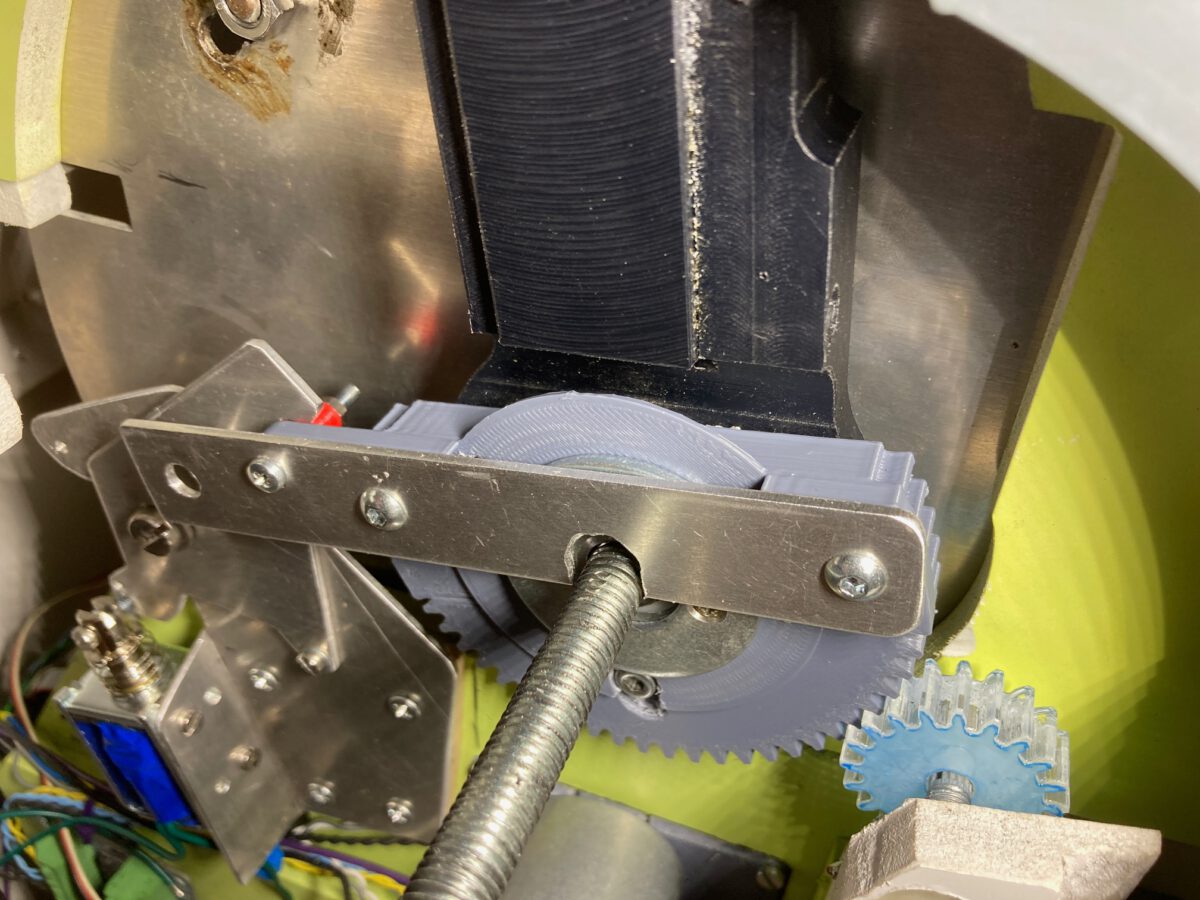
Werking speedbrake lever
De speekbrake lever kan zowel handmatig als automatisch worden bediend. De speedbrakes kunnen automatisch geactiveerd worden als de lever in de ARMED positie staat. Hiervoor moet de lever voorzien worden van een motor. De positie van de lever wordt gemeten door een potmeter die via een tandwiel verbonden is met het tandwiel van de lever. Omdat de DC motor voor de speedbrake niet direct onder dit tandwiel is geplaatst heb ik een aangepast 3D geprint tandwiel gemaakt waarop een aluminium arm kan worden bevestigd die via een aluminium verbinding verbonden wordt met de motor. Ik maak gebruik van een slipkoppeling zodat de lever ook handmatig bediend kan worden.
Flight-detent locking mechanisme
Een lastig (DIY) onderdeel om te maken is het Flight-detent locking mechanisme. Tijdens de vlucht mogen de spoilers niet volledig uitgeschoven worden. Hiervoor wordt de lever beperkt tot de flight-detent positie. Zodra het vliegtuig geland is mogen de spoilers wel volledig uitgeklapt worden. Hiervoor heb ik een locking mechanisme gemaakt van aluminium plaatjes en een 12V solenoid. De solenoid wordt aangesloten op een Phidgets interface relaiskaart die weer aangestuurd kan worden door een gate in ProSim737.
Zodra het vliegtuig tijdens de landing “de wielen op de grond heeft gezet” worden de speedbrakes automatisch geactiveerd. Op hetzelfde moment wordt ook de solenoid kortstondig geactiveerd en gaat het hendeltje uit positie waardoor de lever tot de max positie kan worden geschoven. Wanneer de lever weer terug wordt geschoven sluit het mechanisme weer.





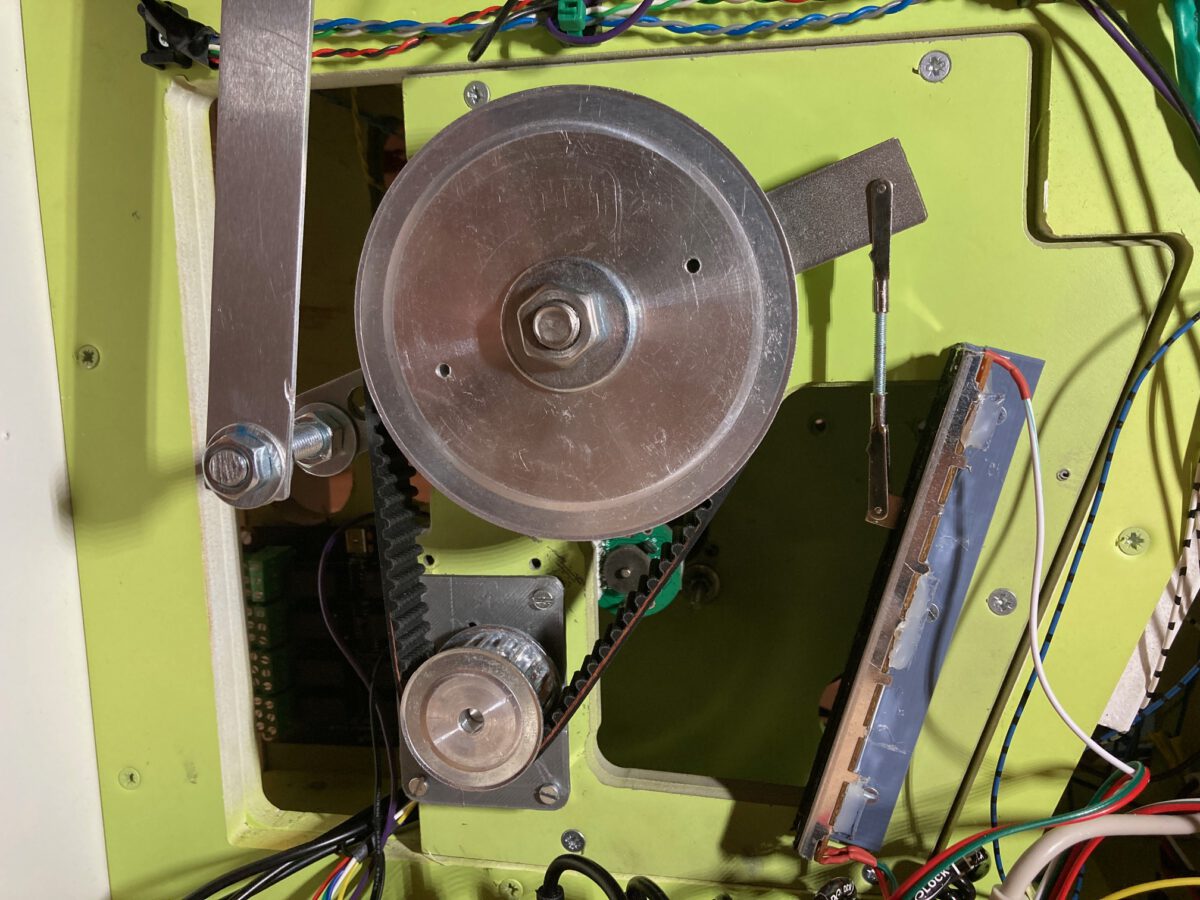
Trimwheels
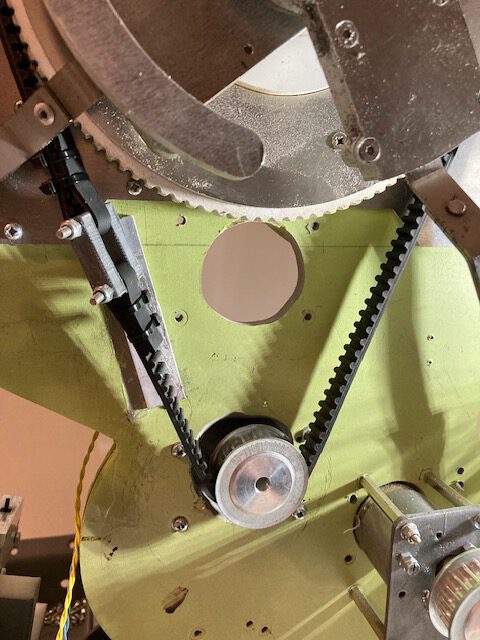
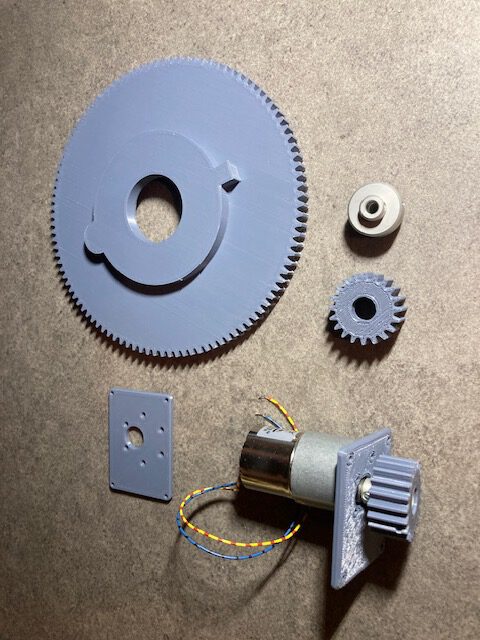
Ook de trimwheels worden gemotoriseerd. Hiervoor gebruik ik een wat krachtigere 12V DC motor met een planetaire gearbox 80 RPM en een ingebouwde encoder voor de positiebepaling. De M10 as waarop beide trimwheels zijn geschroefd heb ik voorzien van een 8M T10 tandwiel. Deze is met een 8M riem verbonden met de motor onder in de control stand. Deze motor is voorzien van een groter 8M T32 tandwiel. Net als de speedbrake-motor wordt deze motor ook aangestuurd door een Pololu JRK 21V3 USB controller kaart. Echter wordt de feedback functie niet gebruikt omdat deze alleen geschikt is voor potmeters.
De encoder heb ik aangesloten op de Leo Bodnar interfacekaart die weer in verbinding staat met ProSim. Deze kaart ondersteunt m.b.v. software wel encoders maar ik ben er achter gekomen dat ik deze in Prosim niet kan koppelen aan de trimwheel encoder in de configuratie. Echter zonder feedback is het trimwheel ook via Prosim aan te sturen, en draait zowel voor- als achteruit. Om er voor te zorgen de gearbox heel blijft heb ik in de Pololu software voor de motor een remtijd ingesteld van 100 ms zodat de motor korte tijd stopt tussen het schakelen van de draairichting.

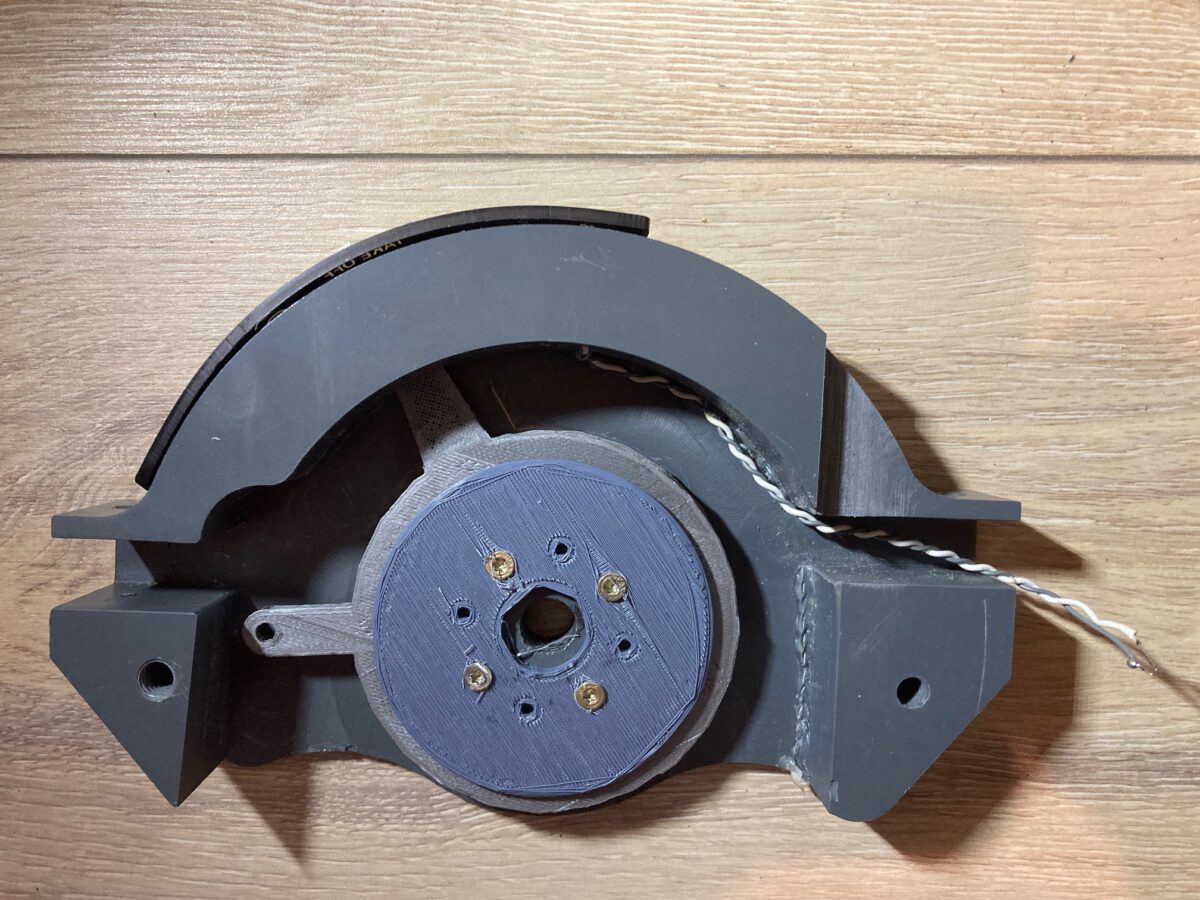
Trim-indicators
De bestaande trim-indicators zijn 3D-geprinte exemplaren die al voorzien zijn van een hendeltje om te verbinden met een aandrijvingsmechanisme. Dit betreft dan ook een relatief eenvoudige upgrade. De 12V DC motor met 1:200 gearbox heb ik met een 3D geprinte motor-mount geïnstalleerd op de daarvoor bestemde positie. Deze is met een tandwiel T20 en een 5M distributieriem verbonden met een T60 tandwiel. Hierdoor ontstaat een overbrenging van 3:1 waardoor met een motortoerental van ca. 30 omwenteling per minuut de trim-indicators op een realistische snelheid bewegen. Overigens is de snelheid uiteraard nog bij te regelen door de Pololu motorcontroller.
Op het grotere tandwiel heb ik een metalen plaatje bevestigd die aan de ene zijde verbonden is met een schuifpotmeter voor de positiebepaling. De andere zijde staat in verbinding met beide trim-indicators. De motor wordt aangestuurd door een Pololu JRK 21V3 waar ook de schuifpotmeter op is aangesloten.


Parking brake lever
De parking brake wordt ook geautomatiseerd. Om de “parkeerrem” in te schakelen trekt de piloot de parking brake lever aan terwijl de rempedalen ingedrukt worden. Deze wordt automatisch weer ontgrendeld zodra de piloot met de voeten de rempedalen indrukt. De lever moet dus automatisch weer terugveren naar de rustpositie. De parking brake lever wordt voorzien van een veertje waardoor deze automatisch terugveert.

De lever wordt op zijn plaatst gehouden door een aluminium arm aan de onderzijde. Deze arm is onder het scharnierpunt verbonden met een 12V solenoid die via de Phidgets relaiskaart aangestuurd wordt door een ProSim gate onder de MCP/throttle configuratie. (parking brake release). Zodra het voetpedaal wordt ingedrukt wordt de solenoid geactiveerd en draait de arm onder de parking brake lever weg en veert deze terug naar de rustpositie. Zodra de parking brake is geactiveerd gaat ook de parking brake indicator (12V lampje met een doorzichtig rood kapje) branden. Deze wordt aangestuurd via een microswitch die verbonden is met een input van de Leo Bodnar kaart. Het lampje zelf wordt geschakeld via de Phidgets relaiskaart.
Interfacing
De originele Revolution Simproducts throttles worden aangestuurd met een SIOC interface. Deze TQ was echter al een keer deels aangepast en voorzien van een alternatieve interface. Alle DC motoren worden aangestuurd door een Pololu JRK 12V12 of 21V3 motorcontroller met feedback. Het verschil in deze kaarten is de stroom die ze continu kunnen leveren. (12A vs 3A) De twee JRK 12V12 kaarten voor d throttle levers waren al aanwezig in deze TQ en de drie 21V3 kaarten heb ik later gekocht. Ook heb ik nog een relaiskaart van Phidgets geïnstalleerd die direct door ProSim kan worden aangestuurd. Op de relaiskaart zijn beide 12V solenoids aangesloten. Deze zijn voorzien van een diode die parallel geschakeld is aan de solenoid om spanningspieken op te vangen bij het uitschakelen. Verder heb ik ook de 12V backlighting aangesloten op de relaiskaart zodat de backlighting ook in- of uitgeschakeld kan worden via Prosim. (dark cockpit)



